2. Overview¶
2.1. Introduction¶
RTEMS, Real-Time Executive for Multiprocessor Systems, is a real-time executive (kernel) which provides a high performance environment for embedded military applications including the following features:
multitasking capabilities
homogeneous and heterogeneous multiprocessor systems
event-driven, priority-based, preemptive scheduling
optional rate monotonic scheduling
intertask communication and synchronization
priority inheritance
responsive interrupt management
dynamic memory allocation
high level of user configurability
This manual describes the usage of RTEMS for applications written in the C programming language. Those implementation details that are processor dependent are provided in the Applications Supplement documents. A supplement document which addresses specific architectural issues that affect RTEMS is provided for each processor type that is supported.
2.2. Real-time Application Systems¶
Real-time application systems are a special class of computer applications. They have a complex set of characteristics that distinguish them from other software problems. Generally, they must adhere to more rigorous requirements. The correctness of the system depends not only on the results of computations, but also on the time at which the results are produced. The most important and complex characteristic of real-time application systems is that they must receive and respond to a set of external stimuli within rigid and critical time constraints referred to as deadlines. Systems can be buried by an avalanche of interdependent, asynchronous or cyclical event streams.
Deadlines can be further characterized as either hard or soft based upon the value of the results when produced after the deadline has passed. A deadline is hard if the results have no value or if their use will result in a catastrophic event. In contrast, results which are produced after a soft deadline may have some value.
Another distinguishing requirement of real-time application systems is the ability to coordinate or manage a large number of concurrent activities. Since software is a synchronous entity, this presents special problems. One instruction follows another in a repeating synchronous cycle. Even though mechanisms have been developed to allow for the processing of external asynchronous events, the software design efforts required to process and manage these events and tasks are growing more complicated.
The design process is complicated further by spreading this activity over a set of processors instead of a single processor. The challenges associated with designing and building real-time application systems become very complex when multiple processors are involved. New requirements such as interprocessor communication channels and global resources that must be shared between competing processors are introduced. The ramifications of multiple processors complicate each and every characteristic of a real-time system.
2.3. Real-time Executive¶
Fortunately, real-time operating systems or real-time executives serve as a cornerstone on which to build the application system. A real-time multitasking executive allows an application to be cast into a set of logical, autonomous processes or tasks which become quite manageable. Each task is internally synchronous, but different tasks execute independently, resulting in an asynchronous processing stream. Tasks can be dynamically paused for many reasons resulting in a different task being allowed to execute for a period of time. The executive also provides an interface to other system components such as interrupt handlers and device drivers. System components may request the executive to allocate and coordinate resources, and to wait for and trigger synchronizing conditions. The executive system calls effectively extend the CPU instruction set to support efficient multitasking. By causing tasks to travel through well-defined state transitions, system calls permit an application to demand-switch between tasks in response to real-time events.
By proper grouping of responses to stimuli into separate tasks, a system can now asynchronously switch between independent streams of execution, directly responding to external stimuli as they occur. This allows the system design to meet critical performance specifications which are typically measured by guaranteed response time and transaction throughput. The multiprocessor extensions of RTEMS provide the features necessary to manage the extra requirements introduced by a system distributed across several processors. It removes the physical barriers of processor boundaries from the world of the system designer, enabling more critical aspects of the system to receive the required attention. Such a system, based on an efficient real-time, multiprocessor executive, is a more realistic model of the outside world or environment for which it is designed. As a result, the system will always be more logical, efficient, and reliable.
By using the directives provided by RTEMS, the real-time applications developer is freed from the problem of controlling and synchronizing multiple tasks and processors. In addition, one need not develop, test, debug, and document routines to manage memory, pass messages, or provide mutual exclusion. The developer is then able to concentrate solely on the application. By using standard software components, the time and cost required to develop sophisticated real-time applications is significantly reduced.
2.4. RTEMS Application Architecture¶
One important design goal of RTEMS was to provide a bridge between two critical layers of typical real-time systems. As shown in the following figure, RTEMS serves as a buffer between the project dependent application code and the target hardware. Most hardware dependencies for real-time applications can be localized to the low level device drivers.
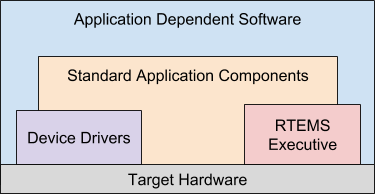
The RTEMS I/O interface manager provides an efficient tool for incorporating these hardware dependencies into the system while simultaneously providing a general mechanism to the application code that accesses them. A well designed real-time system can benefit from this architecture by building a rich library of standard application components which can be used repeatedly in other real-time projects.
2.5. RTEMS Internal Architecture¶
RTEMS can be viewed as a set of layered components that work in harmony to provide a set of services to a real-time application system. The executive interface presented to the application is formed by grouping directives into logical sets called resource managers. Functions utilized by multiple managers such as scheduling, dispatching, and object management are provided in the executive core. The executive core depends on a small set of CPU dependent routines. Together these components provide a powerful run time environment that promotes the development of efficient real-time application systems. The following figure illustrates this organization:
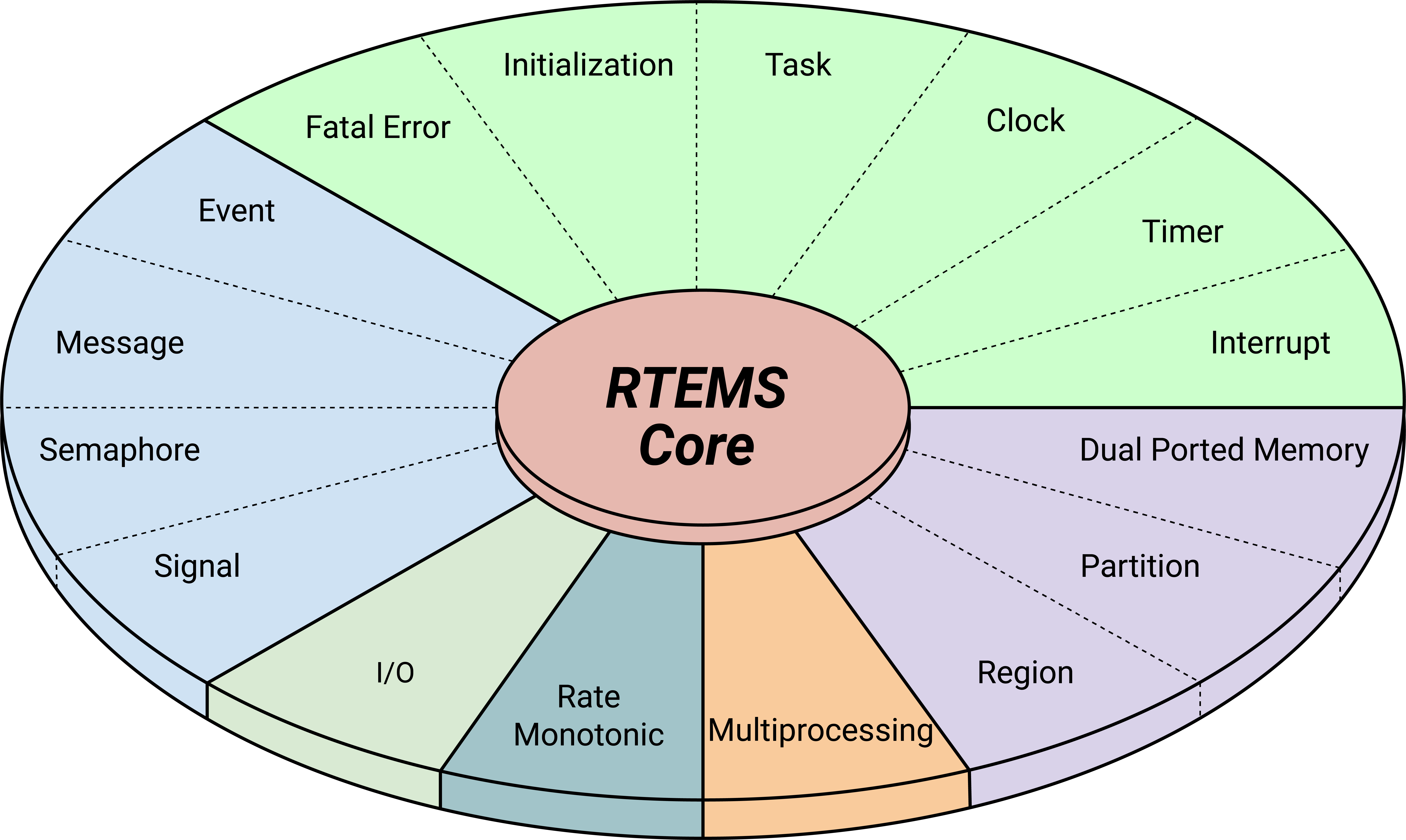
Subsequent chapters present a detailed description of the capabilities provided by each of the following RTEMS managers:
initialization
task
interrupt
clock
timer
semaphore
message
event
signal
partition
region
dual ported memory
I/O
fatal error
rate monotonic
user extensions
multiprocessing
2.6. User Customization and Extensibility¶
As thirty-two bit microprocessors have decreased in cost, they have become increasingly common in a variety of embedded systems. A wide range of custom and general-purpose processor boards are based on various thirty-two bit processors. RTEMS was designed to make no assumptions concerning the characteristics of individual microprocessor families or of specific support hardware. In addition, RTEMS allows the system developer a high degree of freedom in customizing and extending its features.
RTEMS assumes the existence of a supported microprocessor and sufficient memory for both RTEMS and the real-time application. Board dependent components such as clocks, interrupt controllers, or I/O devices can be easily integrated with RTEMS. The customization and extensibility features allow RTEMS to efficiently support as many environments as possible.
2.7. Portability¶
The issue of portability was the major factor in the creation of RTEMS. Since RTEMS is designed to isolate the hardware dependencies in the specific board support packages, the real-time application should be easily ported to any other processor. The use of RTEMS allows the development of real-time applications which can be completely independent of a particular microprocessor architecture.
2.8. Memory Requirements¶
Since memory is a critical resource in many real-time embedded systems, RTEMS was specifically designed to automatically leave out all services that are not required from the run-time environment. Features such as networking, various fileystems, and many other features are completely optional. This allows the application designer the flexibility to tailor RTEMS to most efficiently meet system requirements while still satisfying even the most stringent memory constraints. As a result, the size of the RTEMS executive is application dependent.
RTEMS requires RAM to manage each instance of an RTEMS object that is created. Thus the more RTEMS objects an application needs, the more memory that must be reserved. See Configuring a System.
RTEMS utilizes memory for both code and data space. Although RTEMS’ data space must be in RAM, its code space can be located in either ROM or RAM.
2.9. Audience¶
This manual was written for experienced real-time software developers. Although some background is provided, it is assumed that the reader is familiar with the concepts of task management as well as intertask communication and synchronization. Since directives, user related data structures, and examples are presented in C, a basic understanding of the C programming language is required to fully understand the material presented. However, because of the similarity of the Ada and C RTEMS implementations, users will find that the use and behavior of the two implementations is very similar. A working knowledge of the target processor is helpful in understanding some of RTEMS’ features. A thorough understanding of the executive cannot be obtained without studying the entire manual because many of RTEMS’ concepts and features are interrelated. Experienced RTEMS users will find that the manual organization facilitates its use as a reference document.
2.10. Conventions¶
The following conventions are used in this manual:
Significant words or phrases as well as all directive names are printed in bold type.
Items in bold capital letters are constants defined by RTEMS. Each language interface provided by RTEMS includes a file containing the standard set of constants, data types, and structure definitions which can be incorporated into the user application.
A number of type definitions are provided by RTEMS and can be found in rtems.h.
The characters “0x” preceding a number indicates that the number is in hexadecimal format. Any other numbers are assumed to be in decimal format.
2.11. Manual Organization¶
This first chapter has presented the introductory and background material for the RTEMS executive. The remaining chapters of this manual present a detailed description of RTEMS and the environment, including run time behavior, it creates for the user.
A chapter is dedicated to each manager and provides a detailed discussion of each RTEMS manager and the directives which it provides. The presentation format for each directive includes the following sections:
Calling sequence
Directive status codes
Description
Notes
The following provides an overview of the remainder of this manual:
- Chapter 3:
Key Concepts: presents an introduction to the ideas which are common across multiple RTEMS managers.
- Chapter 4:
RTEMS Data Types: describes the fundamental data types shared by the services in the RTEMS Classic API.
- Chapter 5:
Scheduling Concepts: details the various RTEMS scheduling algorithms and task state transitions.
- Chapter 6:
Initialization Manager: describes the functionality and directives provided by the Initialization Manager.
- Chapter 7:
Task Manager: describes the functionality and directives provided by the Task Manager.
- Chapter 8:
Interrupt Manager: describes the functionality and directives provided by the Interrupt Manager.
- Chapter 9:
Clock Manager: describes the functionality and directives provided by the Clock Manager.
- Chapter 10:
Timer Manager: describes the functionality and directives provided by the Timer Manager.
- Chapter 11:
Rate Monotonic Manager: describes the functionality and directives provided by the Rate Monotonic Manager.
- Chapter 12:
Semaphore Manager: describes the functionality and directives provided by the Semaphore Manager.
- Chapter 13:
Barrier Manager: describes the functionality and directives provided by the Barrier Manager.
- Chapter 14:
Message Manager: describes the functionality and directives provided by the Message Manager.
- Chapter 15:
Event Manager: describes the functionality and directives provided by the Event Manager.
- Chapter 16:
Signal Manager: describes the functionality and directives provided by the Signal Manager.
- Chapter 17:
Partition Manager: describes the functionality and directives provided by the Partition Manager.
- Chapter 18:
Region Manager: describes the functionality and directives provided by the Region Manager.
- Chapter 19:
Dual-Ported Memory Manager: describes the functionality and directives provided by the Dual-Ported Memory Manager.
- Chapter 20:
I/O Manager: describes the functionality and directives provided by the I/O Manager.
- Chapter 21:
Fatal Error Manager: describes the functionality and directives provided by the Fatal Error Manager.
- Chapter 22:
Board Support Packages: defines the functionality required of user-supplied board support packages.
- Chapter 23:
User Extensions: shows the user how to extend RTEMS to incorporate custom features.
- Chapter 24:
Configuring a System: details the process by which one tailors RTEMS for a particular single-processor or multiprocessor application.
- Chapter 25:
Self-Contained Objects: contains information about objects like threads, mutexes and semaphores.
- Chapter 26:
Multiprocessing Manager: presents a conceptual overview of the multiprocessing capabilities provided by RTEMS as well as describing the Multiprocessing Communications Interface Layer and Multiprocessing Manager directives.
- Chapter 27:
Symmetric Multiprocessing (SMP): information regarding the SMP features.
- Chapter 28:
PCI Library: information about using the PCI bus in RTEMS.
- Chapter 29:
Stack Bounds Checker: presents the capabilities of the RTEMS task stack checker which can report stack usage as well as detect bounds violations.
- Chapter 30:
CPU Usage Statistics: presents the capabilities of the CPU Usage statistics gathered on a per task basis along with the mechanisms for reporting and resetting the statistics.
- Chapter 31:
Object Services: presents a collection of helper services useful when manipulating RTEMS objects. These include methods to assist in obtaining an object’s name in printable form. Additional services are provided to decompose an object Id and determine which API and object class it belongs to.
- Chapter 32:
Chains: presents the methods provided to build, iterate and manipulate doubly-linked chains. This manager makes the chain implementation used internally by RTEMS to user space applications.
- Chapter 33:
Red-Black Trees: information about how to use the Red-Black Tree API.
- Chapter 34:
Timespec Helpers: presents a set of helper services useful when manipulating POSIX
struct timespecinstances.- Chapter 35:
Constant Bandwidth Server Scheduler API.
- Chapter 36:
Ada Support: information about Ada programming language support.
- Chapter 37:
Directive Status Codes: provides a definition of each of the directive status codes referenced in this manual.
- Chapter 38:
Linker Sets: information about linker set features.
- Chapter 39:
Example Application: provides a template for simple RTEMS applications.
- Chapter 40:
Glossary: defines terms used throughout this manual.
- Chapter 41:
References: References.
- Chapter 42:
Index: Index.