12. Semaphore Manager¶
12.1. Introduction¶
The semaphore manager utilizes standard Dijkstra counting semaphores to provide synchronization and mutual exclusion capabilities. The directives provided by the semaphore manager are:
- rtems_semaphore_create - Create a semaphore
- rtems_semaphore_ident - Get ID of a semaphore
- rtems_semaphore_delete - Delete a semaphore
- rtems_semaphore_obtain - Acquire a semaphore
- rtems_semaphore_release - Release a semaphore
- rtems_semaphore_flush - Unblock all tasks waiting on a semaphore
- rtems_semaphore_set_priority - Set priority by scheduler for a semaphore
12.2. Background¶
A semaphore can be viewed as a protected variable whose value can be modified
only with the rtems_semaphore_create, rtems_semaphore_obtain, and
rtems_semaphore_release directives. RTEMS supports both binary and
counting semaphores. A binary semaphore is restricted to values of zero or one,
while a counting semaphore can assume any non-negative integer value.
A binary semaphore can be used to control access to a single resource. In
particular, it can be used to enforce mutual exclusion for a critical section
in user code. In this instance, the semaphore would be created with an initial
count of one to indicate that no task is executing the critical section of
code. Upon entry to the critical section, a task must issue the
rtems_semaphore_obtain directive to prevent other tasks from entering the
critical section. Upon exit from the critical section, the task must issue the
rtems_semaphore_release directive to allow another task to execute the
critical section.
A counting semaphore can be used to control access to a pool of two or more
resources. For example, access to three printers could be administered by a
semaphore created with an initial count of three. When a task requires access
to one of the printers, it issues the rtems_semaphore_obtain directive to
obtain access to a printer. If a printer is not currently available, the task
can wait for a printer to become available or return immediately. When the
task has completed printing, it should issue the rtems_semaphore_release
directive to allow other tasks access to the printer.
Task synchronization may be achieved by creating a semaphore with an initial
count of zero. One task waits for the arrival of another task by issuing a
rtems_semaphore_obtain directive when it reaches a synchronization point.
The other task performs a corresponding rtems_semaphore_release operation
when it reaches its synchronization point, thus unblocking the pending task.
12.2.1. Nested Resource Access¶
Deadlock occurs when a task owning a binary semaphore attempts to acquire that same semaphore and blocks as result. Since the semaphore is allocated to a task, it cannot be deleted. Therefore, the task that currently holds the semaphore and is also blocked waiting for that semaphore will never execute again.
RTEMS addresses this problem by allowing the task holding the binary semaphore
to obtain the same binary semaphore multiple times in a nested manner. Each
rtems_semaphore_obtain must be accompanied with a
rtems_semaphore_release. The semaphore will only be made available for
acquisition by other tasks when the outermost rtems_semaphore_obtain is
matched with a rtems_semaphore_release.
Simple binary semaphores do not allow nested access and so can be used for task synchronization.
12.2.2. Priority Inversion¶
Priority inversion is a form of indefinite postponement which is common in multitasking, preemptive executives with shared resources. Priority inversion occurs when a high priority tasks requests access to shared resource which is currently allocated to low priority task. The high priority task must block until the low priority task releases the resource. This problem is exacerbated when the low priority task is prevented from executing by one or more medium priority tasks. Because the low priority task is not executing, it cannot complete its interaction with the resource and release that resource. The high priority task is effectively prevented from executing by lower priority tasks.
12.2.3. Priority Inheritance¶
Priority inheritance is an algorithm that calls for the lower priority task holding a resource to have its priority increased to that of the highest priority task blocked waiting for that resource. Each time a task blocks attempting to obtain the resource, the task holding the resource may have its priority increased.
On SMP configurations, in case the task holding the resource and the task that blocks attempting to obtain the resource are in different scheduler instances, the priority of the holder is raised to the pseudo-interrupt priority (priority boosting). The pseudo-interrupt priority is the highest priority.
RTEMS supports priority inheritance for local, binary semaphores that use the priority task wait queue blocking discipline. When a task of higher priority than the task holding the semaphore blocks, the priority of the task holding the semaphore is increased to that of the blocking task. When the task holding the task completely releases the binary semaphore (i.e. not for a nested release), the holder’s priority is restored to the value it had before any higher priority was inherited.
The RTEMS implementation of the priority inheritance algorithm takes into account the scenario in which a task holds more than one binary semaphore. The holding task will execute at the priority of the higher of the highest ceiling priority or at the priority of the highest priority task blocked waiting for any of the semaphores the task holds. Only when the task releases ALL of the binary semaphores it holds will its priority be restored to the normal value.
12.2.4. Priority Ceiling¶
Priority ceiling is an algorithm that calls for the lower priority task holding a resource to have its priority increased to that of the highest priority task which will EVER block waiting for that resource. This algorithm addresses the problem of priority inversion although it avoids the possibility of changing the priority of the task holding the resource multiple times. The priority ceiling algorithm will only change the priority of the task holding the resource a maximum of one time. The ceiling priority is set at creation time and must be the priority of the highest priority task which will ever attempt to acquire that semaphore.
RTEMS supports priority ceiling for local, binary semaphores that use the priority task wait queue blocking discipline. When a task of lower priority than the ceiling priority successfully obtains the semaphore, its priority is raised to the ceiling priority. When the task holding the task completely releases the binary semaphore (i.e. not for a nested release), the holder’s priority is restored to the value it had before any higher priority was put into effect.
The need to identify the highest priority task which will attempt to obtain a particular semaphore can be a difficult task in a large, complicated system. Although the priority ceiling algorithm is more efficient than the priority inheritance algorithm with respect to the maximum number of task priority changes which may occur while a task holds a particular semaphore, the priority inheritance algorithm is more forgiving in that it does not require this apriori information.
The RTEMS implementation of the priority ceiling algorithm takes into account the scenario in which a task holds more than one binary semaphore. The holding task will execute at the priority of the higher of the highest ceiling priority or at the priority of the highest priority task blocked waiting for any of the semaphores the task holds. Only when the task releases ALL of the binary semaphores it holds will its priority be restored to the normal value.
12.2.5. Multiprocessor Resource Sharing Protocol¶
The Multiprocessor Resource Sharing Protocol (MrsP) is defined in A. Burns
and A.J. Wellings, A Schedulability Compatible Multiprocessor Resource Sharing
Protocol - MrsP, Proceedings of the 25th Euromicro Conference on Real-Time
Systems (ECRTS 2013), July 2013. It is a generalization of the Priority
Ceiling Protocol to SMP systems. Each MrsP semaphore uses a ceiling priority
per scheduler instance. These ceiling priorities can be specified with
rtems_semaphore_set_priority(). A task obtaining or owning a MrsP
semaphore will execute with the ceiling priority for its scheduler instance as
specified by the MrsP semaphore object. Tasks waiting to get ownership of a
MrsP semaphore will not relinquish the processor voluntarily. In case the
owner of a MrsP semaphore gets preempted it can ask all tasks waiting for this
semaphore to help out and temporarily borrow the right to execute on one of
their assigned processors.
12.2.6. Building a Semaphore Attribute Set¶
In general, an attribute set is built by a bitwise OR of the desired attribute components. The following table lists the set of valid semaphore attributes:
RTEMS_FIFO |
tasks wait by FIFO (default) |
RTEMS_PRIORITY |
tasks wait by priority |
RTEMS_BINARY_SEMAPHORE |
restrict values to 0 and 1 |
RTEMS_COUNTING_SEMAPHORE |
no restriction on values (default) |
RTEMS_SIMPLE_BINARY_SEMAPHORE |
restrict values to 0 and 1, do not allow nested access, allow deletion of locked semaphore. |
RTEMS_NO_INHERIT_PRIORITY |
do not use priority inheritance (default) |
RTEMS_INHERIT_PRIORITY |
use priority inheritance |
RTEMS_NO_PRIORITY_CEILING |
do not use priority ceiling (default) |
RTEMS_PRIORITY_CEILING |
use priority ceiling |
RTEMS_NO_MULTIPROCESSOR_RESOURCE_SHARING |
do not use Multiprocessor Resource Sharing Protocol (default) |
RTEMS_MULTIPROCESSOR_RESOURCE_SHARING |
use Multiprocessor Resource Sharing Protocol |
RTEMS_LOCAL |
local semaphore (default) |
RTEMS_GLOBAL |
global semaphore |
Attribute values are specifically designed to be mutually exclusive, therefore
bitwise OR and addition operations are equivalent as long as each attribute
appears exactly once in the component list. An attribute listed as a default
is not required to appear in the attribute list, although it is a good
programming practice to specify default attributes. If all defaults are
desired, the attribute RTEMS_DEFAULT_ATTRIBUTES should be specified on this
call.
This example demonstrates the attribute_set parameter needed to create a local
semaphore with the task priority waiting queue discipline. The attribute_set
parameter passed to the rtems_semaphore_create directive could be either
RTEMS_PRIORITY or RTEMS_LOCAL | RTEMS_PRIORITY. The attribute_set
parameter can be set to RTEMS_PRIORITY because RTEMS_LOCAL is the
default for all created tasks. If a similar semaphore were to be known
globally, then the attribute_set parameter would be RTEMS_GLOBAL |
RTEMS_PRIORITY.
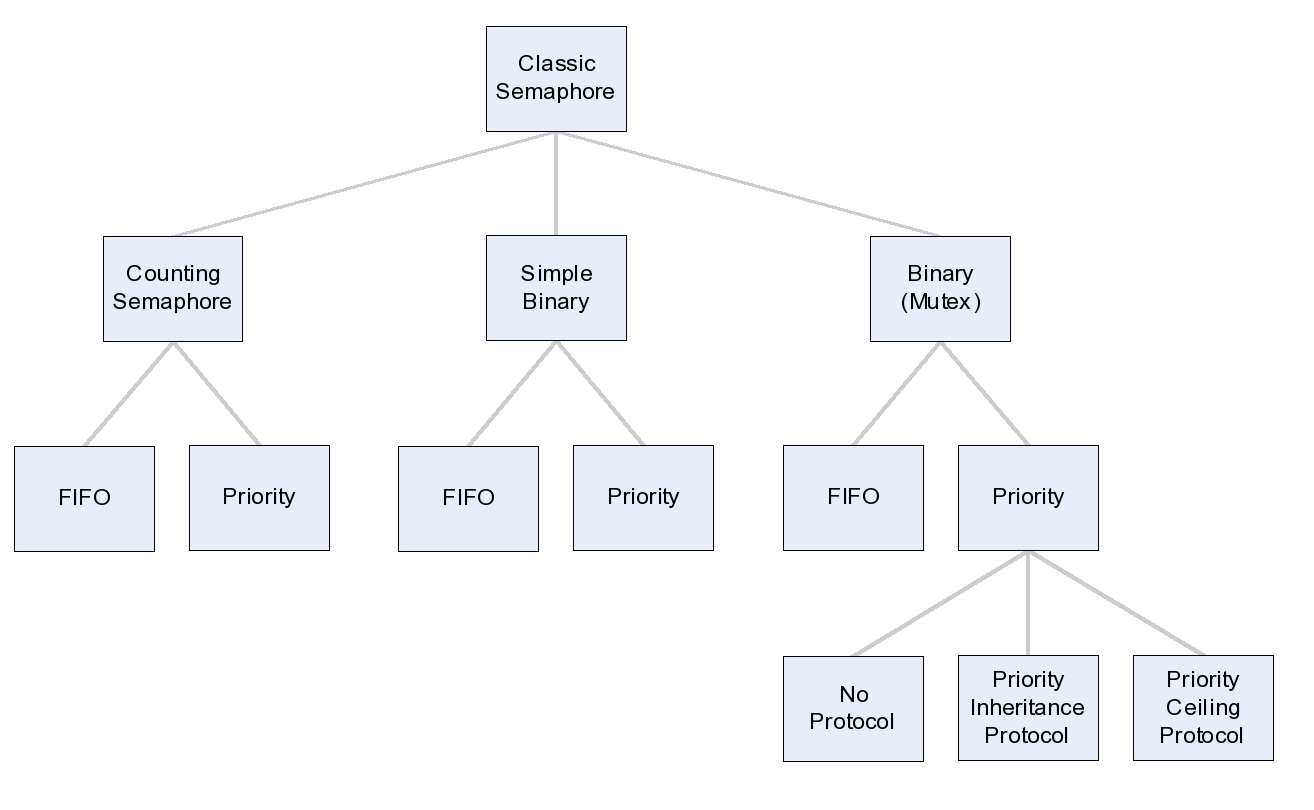
Some combinatinos of these attributes are invalid. For example, priority ordered blocking discipline must be applied to a binary semaphore in order to use either the priority inheritance or priority ceiling functionality. The following tree figure illustrates the valid combinations.
12.2.7. Building a SEMAPHORE_OBTAIN Option Set¶
In general, an option is built by a bitwise OR of the desired option
components. The set of valid options for the rtems_semaphore_obtain
directive are listed in the following table:
RTEMS_WAIT |
task will wait for semaphore (default) |
RTEMS_NO_WAIT |
task should not wait |
Option values are specifically designed to be mutually exclusive, therefore
bitwise OR and addition operations are equivalent as long as each attribute
appears exactly once in the component list. An option listed as a default is
not required to appear in the list, although it is a good programming practice
to specify default options. If all defaults are desired, the option
RTEMS_DEFAULT_OPTIONS should be specified on this call.
This example demonstrates the option parameter needed to poll for a semaphore.
The option parameter passed to the rtems_semaphore_obtain directive should
be RTEMS_NO_WAIT.
12.3. Operations¶
12.3.1. Creating a Semaphore¶
The rtems_semaphore_create directive creates a binary or counting semaphore
with a user-specified name as well as an initial count. If a binary semaphore
is created with a count of zero (0) to indicate that it has been allocated,
then the task creating the semaphore is considered the current holder of the
semaphore. At create time the method for ordering waiting tasks in the
semaphore’s task wait queue (by FIFO or task priority) is specified.
Additionally, the priority inheritance or priority ceiling algorithm may be
selected for local, binary semaphores that use the priority task wait queue
blocking discipline. If the priority ceiling algorithm is selected, then the
highest priority of any task which will attempt to obtain this semaphore must
be specified. RTEMS allocates a Semaphore Control Block (SMCB) from the SMCB
free list. This data structure is used by RTEMS to manage the newly created
semaphore. Also, a unique semaphore ID is generated and returned to the
calling task.
12.3.2. Obtaining Semaphore IDs¶
When a semaphore is created, RTEMS generates a unique semaphore ID and assigns
it to the created semaphore until it is deleted. The semaphore ID may be
obtained by either of two methods. First, as the result of an invocation of
the rtems_semaphore_create directive, the semaphore ID is stored in a user
provided location. Second, the semaphore ID may be obtained later using the
rtems_semaphore_ident directive. The semaphore ID is used by other
semaphore manager directives to access this semaphore.
12.3.3. Acquiring a Semaphore¶
The rtems_semaphore_obtain directive is used to acquire the
specified semaphore. A simplified version of the rtems_semaphore_obtain
directive can be described as follows:
If the semaphore’s count is greater than zero then decrement the semaphore’s count else wait for release of semaphore then return SUCCESSFUL.
When the semaphore cannot be immediately acquired, one of the following situations applies:
- By default, the calling task will wait forever to acquire the semaphore.
- Specifying
RTEMS_NO_WAITforces an immediate return with an error status code. - Specifying a timeout limits the interval the task will wait before returning with an error status code.
If the task waits to acquire the semaphore, then it is placed in the semaphore’s task wait queue in either FIFO or task priority order. If the task blocked waiting for a binary semaphore using priority inheritance and the task’s priority is greater than that of the task currently holding the semaphore, then the holding task will inherit the priority of the blocking task. All tasks waiting on a semaphore are returned an error code when the semaphore is deleted.
When a task successfully obtains a semaphore using priority ceiling and the priority ceiling for this semaphore is greater than that of the holder, then the holder’s priority will be elevated.
12.3.4. Releasing a Semaphore¶
The rtems_semaphore_release directive is used to release the specified
semaphore. A simplified version of the rtems_semaphore_release directive
can be described as follows:
If there sre no tasks are waiting on this semaphore then increment the semaphore’s count else assign semaphore to a waiting task and return SUCCESSFUL.
If this is the outermost release of a binary semaphore that uses priority
inheritance or priority ceiling and the task does not currently hold any other
binary semaphores, then the task performing the rtems_semaphore_release
will have its priority restored to its normal value.
12.3.5. Deleting a Semaphore¶
The rtems_semaphore_delete directive removes a semaphore from the system
and frees its control block. A semaphore can be deleted by any local task that
knows the semaphore’s ID. As a result of this directive, all tasks blocked
waiting to acquire the semaphore will be readied and returned a status code
which indicates that the semaphore was deleted. Any subsequent references to
the semaphore’s name and ID are invalid.
12.4. Directives¶
This section details the semaphore manager’s directives. A subsection is dedicated to each of this manager’s directives and describes the calling sequence, related constants, usage, and status codes.
12.4.1. SEMAPHORE_CREATE - Create a semaphore¶
- CALLING SEQUENCE:
rtems_status_code rtems_semaphore_create( rtems_name name, uint32_t count, rtems_attribute attribute_set, rtems_task_priority priority_ceiling, rtems_id *id );
- DIRECTIVE STATUS CODES:
RTEMS_SUCCESSFULsemaphore created successfully RTEMS_INVALID_NAMEinvalid semaphore name RTEMS_INVALID_ADDRESSidis NULLRTEMS_TOO_MANYtoo many semaphores created RTEMS_NOT_DEFINEDinvalid attribute set RTEMS_INVALID_NUMBERinvalid starting count for binary semaphore RTEMS_MP_NOT_CONFIGUREDmultiprocessing not configured RTEMS_TOO_MANYtoo many global objects - DESCRIPTION:
This directive creates a semaphore which resides on the local node. The created semaphore has the user-defined name specified in name and the initial count specified in count. For control and maintenance of the semaphore, RTEMS allocates and initializes a SMCB. The RTEMS-assigned semaphore id is returned in id. This semaphore id is used with other semaphore related directives to access the semaphore.
Specifying PRIORITY in attribute_set causes tasks waiting for a semaphore to be serviced according to task priority. When FIFO is selected, tasks are serviced in First In-First Out order.
- NOTES:
This directive will not cause the calling task to be preempted.
The priority inheritance and priority ceiling algorithms are only supported for local, binary semaphores that use the priority task wait queue blocking discipline.
The following semaphore attribute constants are defined by RTEMS:
RTEMS_FIFOtasks wait by FIFO (default) RTEMS_PRIORITYtasks wait by priority RTEMS_BINARY_SEMAPHORErestrict values to 0 and 1 RTEMS_COUNTING_SEMAPHOREno restriction on values (default) RTEMS_SIMPLE_BINARY_SEMAPHORErestrict values to 0 and 1, block on nested access, allow deletion of locked semaphore. RTEMS_NO_INHERIT_PRIORITYdo not use priority inheritance (default) RTEMS_INHERIT_PRIORITYuse priority inheritance RTEMS_NO_PRIORITY_CEILINGdo not use priority ceiling (default) RTEMS_PRIORITY_CEILINGuse priority ceiling RTEMS_NO_MULTIPROCESSOR_RESOURCE_SHARINGdo not use Multiprocessor Resource Sharing Protocol (default) RTEMS_MULTIPROCESSOR_RESOURCE_SHARINGuse Multiprocessor Resource Sharing Protocol RTEMS_LOCALlocal semaphore (default) RTEMS_GLOBALglobal semaphore Semaphores should not be made global unless remote tasks must interact with the created semaphore. This is to avoid the system overhead incurred by the creation of a global semaphore. When a global semaphore is created, the semaphore’s name and id must be transmitted to every node in the system for insertion in the local copy of the global object table.
Note, some combinations of attributes are not valid. See the earlier discussion on this.
The total number of global objects, including semaphores, is limited by the maximum_global_objects field in the Configuration Table.
It is not allowed to create an initially locked MrsP semaphore and the
RTEMS_INVALID_NUMBERstatus code will be returned on SMP configurations in this case. This prevents lock order reversal problems with the allocator mutex.
12.4.2. SEMAPHORE_IDENT - Get ID of a semaphore¶
- CALLING SEQUENCE:
rtems_status_code rtems_semaphore_ident( rtems_name name, uint32_t node, rtems_id *id );
- DIRECTIVE STATUS CODES:
RTEMS_SUCCESSFULsemaphore identified successfully RTEMS_INVALID_NAMEsemaphore name not found RTEMS_INVALID_NODEinvalid node id - DESCRIPTION:
- This directive obtains the semaphore id associated with the semaphore name. If the semaphore name is not unique, then the semaphore id will match one of the semaphores with that name. However, this semaphore id is not guaranteed to correspond to the desired semaphore. The semaphore id is used by other semaphore related directives to access the semaphore.
- NOTES:
This directive will not cause the running task to be preempted.
If node is
RTEMS_SEARCH_ALL_NODES, all nodes are searched with the local node being searched first. All other nodes are searched with the lowest numbered node searched first.If node is a valid node number which does not represent the local node, then only the semaphores exported by the designated node are searched.
This directive does not generate activity on remote nodes. It accesses only the local copy of the global object table.
12.4.3. SEMAPHORE_DELETE - Delete a semaphore¶
- CALLING SEQUENCE:
rtems_status_code rtems_semaphore_delete( rtems_id id );
- DIRECTIVE STATUS CODES:
RTEMS_SUCCESSFULsemaphore deleted successfully RTEMS_INVALID_IDinvalid semaphore id RTEMS_RESOURCE_IN_USEbinary semaphore is in use RTEMS_ILLEGAL_ON_REMOTE_OBJECTcannot delete remote semaphore - DESCRIPTION:
- This directive deletes the semaphore specified by
id. All tasks blocked waiting to acquire the semaphore will be readied and returned a status code which indicates that the semaphore was deleted. The SMCB for this semaphore is reclaimed by RTEMS. - NOTES:
The calling task will be preempted if it is enabled by the task’s execution mode and a higher priority local task is waiting on the deleted semaphore. The calling task will NOT be preempted if all of the tasks that are waiting on the semaphore are remote tasks.
The calling task does not have to be the task that created the semaphore. Any local task that knows the semaphore id can delete the semaphore.
When a global semaphore is deleted, the semaphore id must be transmitted to every node in the system for deletion from the local copy of the global object table.
The semaphore must reside on the local node, even if the semaphore was created with the
RTEMS_GLOBALoption.Proxies, used to represent remote tasks, are reclaimed when the semaphore is deleted.
12.4.4. SEMAPHORE_OBTAIN - Acquire a semaphore¶
- CALLING SEQUENCE:
rtems_status_code rtems_semaphore_obtain( rtems_id id, rtems_option option_set, rtems_interval timeout );
- DIRECTIVE STATUS CODES:
RTEMS_SUCCESSFULsemaphore obtained successfully RTEMS_UNSATISFIEDsemaphore not available RTEMS_TIMEOUTtimed out waiting for semaphore RTEMS_OBJECT_WAS_DELETEDsemaphore deleted while waiting RTEMS_INVALID_IDinvalid semaphore id - DESCRIPTION:
This directive acquires the semaphore specified by id. The
RTEMS_WAITandRTEMS_NO_WAITcomponents of the options parameter indicate whether the calling task wants to wait for the semaphore to become available or return immediately if the semaphore is not currently available. With eitherRTEMS_WAITorRTEMS_NO_WAIT, if the current semaphore count is positive, then it is decremented by one and the semaphore is successfully acquired by returning immediately with a successful return code.If the calling task chooses to return immediately and the current semaphore count is zero or negative, then a status code is returned indicating that the semaphore is not available. If the calling task chooses to wait for a semaphore and the current semaphore count is zero or negative, then it is decremented by one and the calling task is placed on the semaphore’s wait queue and blocked. If the semaphore was created with the
RTEMS_PRIORITYattribute, then the calling task is inserted into the queue according to its priority. However, if the semaphore was created with theRTEMS_FIFOattribute, then the calling task is placed at the rear of the wait queue. If the binary semaphore was created with theRTEMS_INHERIT_PRIORITYattribute, then the priority of the task currently holding the binary semaphore is guaranteed to be greater than or equal to that of the blocking task. If the binary semaphore was created with theRTEMS_PRIORITY_CEILINGattribute, a task successfully obtains the semaphore, and the priority of that task is greater than the ceiling priority for this semaphore, then the priority of the task obtaining the semaphore is elevated to that of the ceiling.The timeout parameter specifies the maximum interval the calling task is willing to be blocked waiting for the semaphore. If it is set to
RTEMS_NO_TIMEOUT, then the calling task will wait forever. If the semaphore is available or theRTEMS_NO_WAIToption component is set, then timeout is ignored.Deadlock situations are detected for MrsP semaphores and the
RTEMS_UNSATISFIEDstatus code will be returned on SMP configurations in this case.- NOTES:
The following semaphore acquisition option constants are defined by RTEMS:
RTEMS_WAITtask will wait for semaphore (default) RTEMS_NO_WAITtask should not wait Attempting to obtain a global semaphore which does not reside on the local node will generate a request to the remote node to access the semaphore. If the semaphore is not available and
RTEMS_NO_WAITwas not specified, then the task must be blocked until the semaphore is released. A proxy is allocated on the remote node to represent the task until the semaphore is released.A clock tick is required to support the timeout functionality of this directive.
It is not allowed to obtain a MrsP semaphore more than once by one task at a time (nested access) and the
RTEMS_UNSATISFIEDstatus code will be returned on SMP configurations in this case.
12.4.5. SEMAPHORE_RELEASE - Release a semaphore¶
- CALLING SEQUENCE:
rtems_status_code rtems_semaphore_release( rtems_id id );
- DIRECTIVE STATUS CODES:
RTEMS_SUCCESSFULsemaphore released successfully RTEMS_INVALID_IDinvalid semaphore id RTEMS_NOT_OWNER_OF_RESOURCEcalling task does not own semaphore RTEMS_INCORRECT_STATEinvalid unlock order - DESCRIPTION:
- This directive releases the semaphore specified by id. The semaphore count is incremented by one. If the count is zero or negative, then the first task on this semaphore’s wait queue is removed and unblocked. The unblocked task may preempt the running task if the running task’s preemption mode is enabled and the unblocked task has a higher priority than the running task.
- NOTES:
The calling task may be preempted if it causes a higher priority task to be made ready for execution.
Releasing a global semaphore which does not reside on the local node will generate a request telling the remote node to release the semaphore.
If the task to be unblocked resides on a different node from the semaphore, then the semaphore allocation is forwarded to the appropriate node, the waiting task is unblocked, and the proxy used to represent the task is reclaimed.
The outermost release of a local, binary, priority inheritance or priority ceiling semaphore may result in the calling task having its priority lowered. This will occur if the calling task holds no other binary semaphores and it has inherited a higher priority.
The MrsP semaphores must be released in the reversed obtain order, otherwise the
RTEMS_INCORRECT_STATEstatus code will be returned on SMP configurations in this case.
12.4.6. SEMAPHORE_FLUSH - Unblock all tasks waiting on a semaphore¶
- CALLING SEQUENCE:
rtems_status_code rtems_semaphore_flush( rtems_id id );
- DIRECTIVE STATUS CODES:
RTEMS_SUCCESSFULsemaphore released successfully RTEMS_INVALID_IDinvalid semaphore id RTEMS_NOT_DEFINEDoperation not defined for the protocol ofthe semaphore RTEMS_ILLEGAL_ON_REMOTE_OBJECTnot supported for remote semaphores - DESCRIPTION:
This directive unblocks all tasks waiting on the semaphore specified by id. Since there are tasks blocked on the semaphore, the semaphore’s count is not changed by this directive and thus is zero before and after this directive is executed. Tasks which are unblocked as the result of this directive will return from the
rtems_semaphore_obtaindirective with a status code ofRTEMS_UNSATISFIEDto indicate that the semaphore was not obtained.This directive may unblock any number of tasks. Any of the unblocked tasks may preempt the running task if the running task’s preemption mode is enabled and an unblocked task has a higher priority than the running task.
- NOTES:
The calling task may be preempted if it causes a higher priority task to be made ready for execution.
If the task to be unblocked resides on a different node from the semaphore, then the waiting task is unblocked, and the proxy used to represent the task is reclaimed.
It is not allowed to flush a MrsP semaphore and the
RTEMS_NOT_DEFINEDstatus code will be returned on SMP configurations in this case.
12.4.7. SEMAPHORE_SET_PRIORITY - Set priority by scheduler for a semaphore¶
- CALLING SEQUENCE:
rtems_status_code rtems_semaphore_set_priority( rtems_id semaphore_id, rtems_id scheduler_id, rtems_task_priority new_priority, rtems_task_priority *old_priority );
- DIRECTIVE STATUS CODES:
RTEMS_SUCCESSFULsuccessful operation RTEMS_INVALID_IDinvalid semaphore or scheduler id RTEMS_INVALID_ADDRESSold_priorityis NULLRTEMS_INVALID_PRIORITYinvalid new priority value RTEMS_NOT_DEFINEDoperation not defined for the protocol ofthe semaphore RTEMS_ILLEGAL_ON_REMOTE_OBJECTnot supported for remote semaphores - DESCRIPTION:
This directive sets the priority value with respect to the specified scheduler of a semaphore.
The special priority value
RTEMS_CURRENT_PRIORITYcan be used to get the current priority value without changing it.The interpretation of the priority value depends on the protocol of the semaphore object.
- The Multiprocessor Resource Sharing Protocol needs a ceiling priority per scheduler instance. This operation can be used to specify these priority values.
- For the Priority Ceiling Protocol the ceiling priority is used with this operation.
- For other protocols this operation is not defined.
- EXAMPLE:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83
#include <assert.h> #include <stdlib.h> #include <rtems.h> #define SCHED_A rtems_build_name(' ', ' ', ' ', 'A') #define SCHED_B rtems_build_name(' ', ' ', ' ', 'B') static void Init(rtems_task_argument arg) { rtems_status_code sc; rtems_id semaphore_id; rtems_id scheduler_a_id; rtems_id scheduler_b_id; rtems_task_priority prio; /* Get the scheduler identifiers */ sc = rtems_scheduler_ident(SCHED_A, &scheduler_a_id); assert(sc == RTEMS_SUCCESSFUL); sc = rtems_scheduler_ident(SCHED_B, &scheduler_b_id); assert(sc == RTEMS_SUCCESSFUL); /* Create a MrsP semaphore object */ sc = rtems_semaphore_create( rtems_build_name('M', 'R', 'S', 'P'), 1, RTEMS_MULTIPROCESSOR_RESOURCE_SHARING | RTEMS_BINARY_SEMAPHORE, 1, &semaphore_id ); assert(sc == RTEMS_SUCCESSFUL); /* * The ceiling priority values per scheduler are equal to the value specified * for object creation. */ prio = RTEMS_CURRENT_PRIORITY; sc = rtems_semaphore_set_priority(semaphore_id, scheduler_a_id, prio, &prio); assert(sc == RTEMS_SUCCESSFUL); assert(prio == 1); /* Check the old value and set a new ceiling priority for scheduler B */ prio = 2; sc = rtems_semaphore_set_priority(semaphore_id, scheduler_b_id, prio, &prio); assert(sc == RTEMS_SUCCESSFUL); assert(prio == 1); /* Check the ceiling priority values */ prio = RTEMS_CURRENT_PRIORITY; sc = rtems_semaphore_set_priority(semaphore_id, scheduler_a_id, prio, &prio); assert(sc == RTEMS_SUCCESSFUL); assert(prio == 1); prio = RTEMS_CURRENT_PRIORITY; sc = rtems_semaphore_set_priority(semaphore_id, scheduler_b_id, prio, &prio); assert(sc == RTEMS_SUCCESSFUL); assert(prio == 2); sc = rtems_semaphore_delete(semaphore_id); assert(sc == RTEMS_SUCCESSFUL); exit(0); } #define CONFIGURE_SMP_APPLICATION #define CONFIGURE_APPLICATION_NEEDS_CLOCK_DRIVER #define CONFIGURE_APPLICATION_NEEDS_CONSOLE_DRIVER #define CONFIGURE_MAXIMUM_TASKS 1 #define CONFIGURE_MAXIMUM_SEMAPHORES 1 #define CONFIGURE_MAXIMUM_MRSP_SEMAPHORES 1 #define CONFIGURE_SMP_MAXIMUM_PROCESSORS 2 #define CONFIGURE_SCHEDULER_SIMPLE_SMP #include <rtems/scheduler.h> RTEMS_SCHEDULER_CONTEXT_SIMPLE_SMP(a); RTEMS_SCHEDULER_CONTEXT_SIMPLE_SMP(b); #define CONFIGURE_SCHEDULER_CONTROLS \ RTEMS_SCHEDULER_CONTROL_SIMPLE_SMP(a, SCHED_A), \ RTEMS_SCHEDULER_CONTROL_SIMPLE_SMP(b, SCHED_B) #define CONFIGURE_SMP_SCHEDULER_ASSIGNMENTS \ RTEMS_SCHEDULER_ASSIGN(0, RTEMS_SCHEDULER_ASSIGN_PROCESSOR_MANDATORY), \ RTEMS_SCHEDULER_ASSIGN(1, RTEMS_SCHEDULER_ASSIGN_PROCESSOR_MANDATORY) #define CONFIGURE_RTEMS_INIT_TASKS_TABLE #define CONFIGURE_INIT #include <rtems/confdefs.h>